Яков Бернштейн — лицензированный во Флориде педортист: специалист по биомеханике стопы, ортопедической обуви, индивидуальным стелькам и ортезам стопы.

В США педортист — это медицинский специалист смежного профиля, который помогает пациентам с проблемами стоп, обуви, походки, давления на стопу и комфорта при ходьбе. Многие пациенты приходят к Якову по направлению местных подологов, ортопедов и врачей, когда им нужны не просто “удобные туфли”, а правильно подобранное решение для стопы.
Задача педортиста — внимательно оценить, как стопа стоит, как она двигается, где возникает перегрузка, давление или нестабильность, и подобрать практическое решение: обувь, готовые ортопедические стельки, индивидуальные ортезы, модификации обуви или вспомогательные педортические изделия.
Оценка и анализ
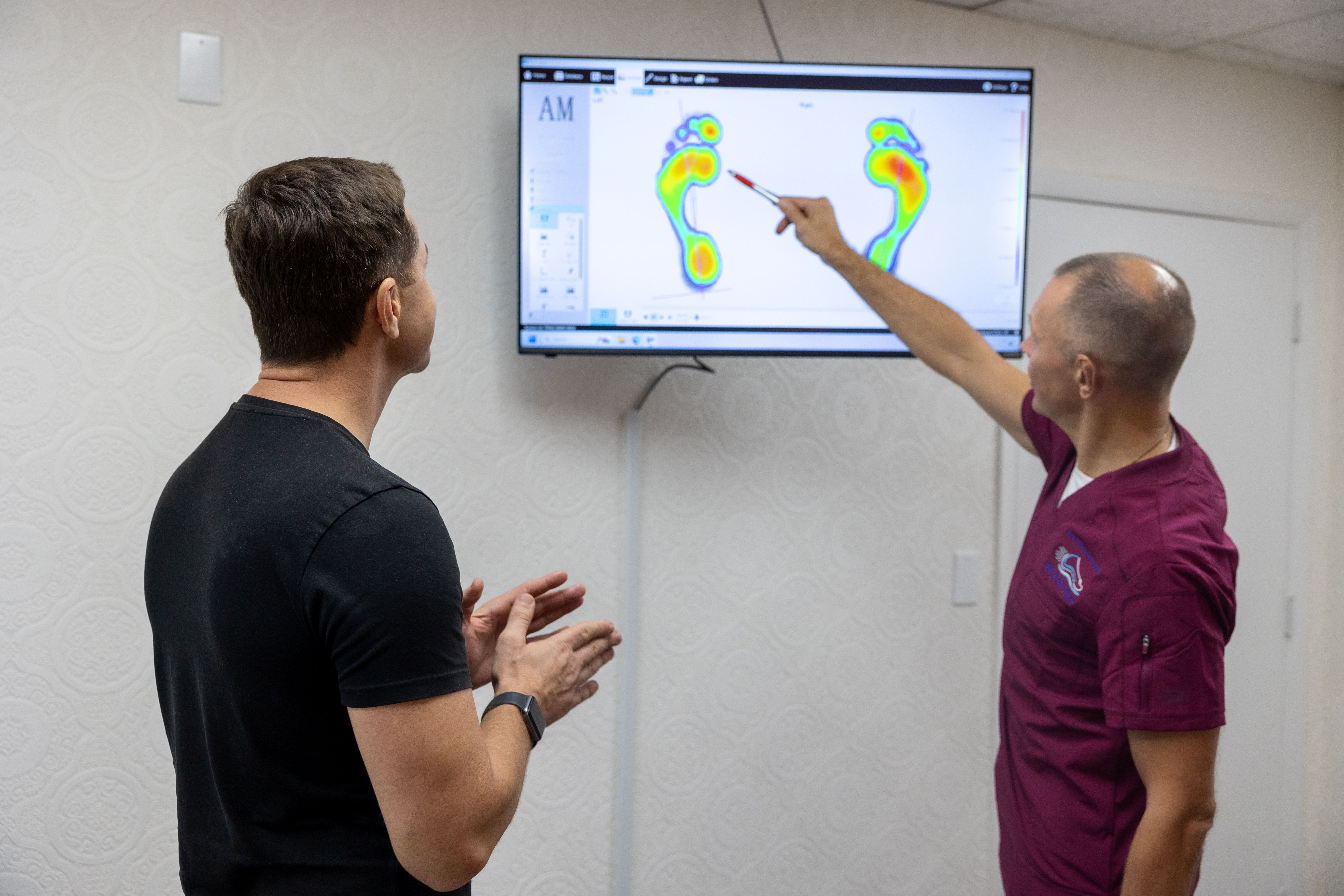
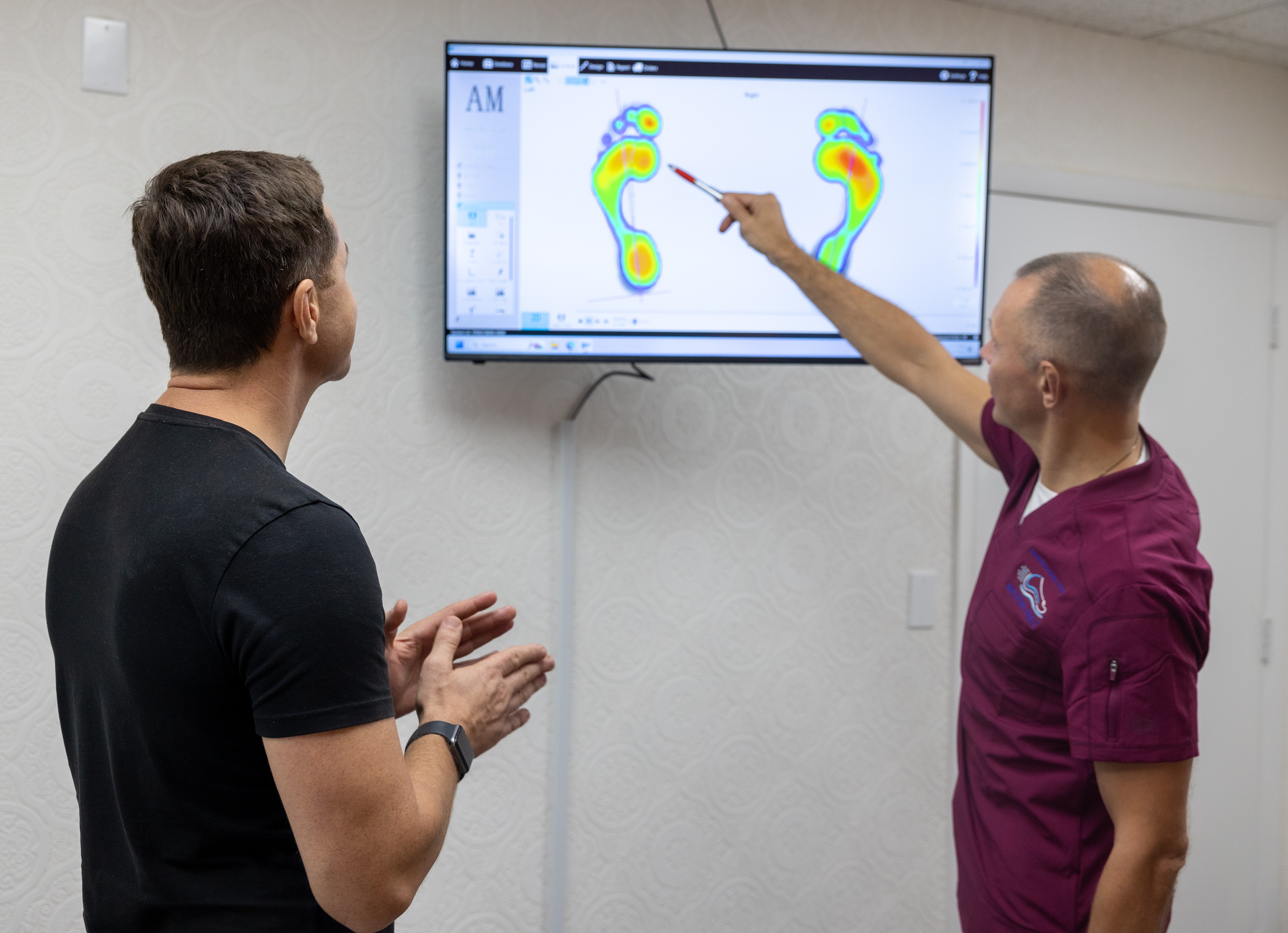
Клиническая оценка формы стопы, давления и посадки обуви
Сначала проводится оценка стопы и обуви. Яков оценивает форму стопы, свод, пятку, передний отдел стопы, зоны давления, устойчивость, походку, износ обуви и то, как обувь реально сидит на ноге.
Цель этой оценки простая: понять, почему человеку неудобно ходить, где стопа не получает достаточной поддержки, и какое решение может помочь уменьшить нагрузку, улучшить посадку обуви и сделать ходьбу более стабильной и комфортной.
Что подбирается
После оценки Яков дает рекомендации по обуви и стелькам. Это может включать:
Правильную ортопедическую или терапевтическую обувь — с учетом ширины, глубины, формы носочной части, поддержки пятки, устойчивости подошвы и особенностей стопы. Рекомендации могут включать не только закрытую обувь, но и подходящую открытую обувь: сандалии, шлепанцы и slides, если такая конструкция безопасна и уместна для конкретной стопы.
Готовые ортопедические стельки — когда пациенту нужно быстрое и практичное решение. В зависимости от стопы и жалоб Яков может подобрать наиболее эффективную профессиональную готовую стельку из ассортимента, который обычно продается в специализированных ортопедических магазинах. Это могут быть Anodyne Multizone 111, PowerStep, Saluber, а также мягкие accommodative-стельки из Plastazote для более чувствительных стоп.
Индивидуальные ортезы стопы — если готовой стельки недостаточно. Для этого проводится цифровое сканирование стопы на современном VeriScan Podiatric Scanner с лазерным и оптическим режимами сканирования. По назначению Якова индивидуальные ортезы изготавливаются в высококлассной канадской лаборатории. Обычно срок изготовления — около двух недель.

Ортопедическая обувь, готовые стельки и индивидуальные ортезы для клинически безопасной поддержки стопы.
Как обычно проходит процесс

Чаще всего пациенту не приходится ждать две недели без поддержки.
Пока индивидуальные ортезы изготавливаются, подбирается лучшее временное решение: готовая ортопедическая стелька и обувь, которые уже сейчас дают более правильную посадку, поддержку и компенсацию. Затем, когда индивидуальные ортезы готовы, проверяется их посадка в обуви и при необходимости уточняются рекомендации.
Такой подход позволяет пациенту получить помощь сразу, а затем перейти на более точное индивидуальное решение.
Роль Алексея Семёнова

Алексей Семёнов, Therapeutic Shoe Fitter, работает под непосредственным наблюдением Якова и в рамках его рекомендаций.
После оценки и рекомендаций Якова Алексей помогает пациенту найти наиболее подходящую модель обуви из имеющегося ассортимента — как с готовыми ортопедическими стельками, так и без них. Это может быть закрытая обувь, а также подходящие сандалии, шлепанцы или slides, если они соответствуют потребностям пациента.
Алексей также может определить другие модели, доступные онлайн или под заказ у специализированных ортопедических брендов, которые смогут подойти пациенту по комфорту, ожидаемому эффекту и стилю, который нравится пациенту.
Все окончательные рекомендации по обуви, стелькам и ортезам согласуются с Яковом и утверждаются им как supervising pedorthist.
Дополнительная помощь
Яков также обучен подбору компрессионных чулок, а также использованию модульных подушечек, подпяточников, лифтов и других педортических аксессуаров, которые могут улучшить посадку обуви и снизить дискомфорт.
Алексей хорошо разбирается в категории ортопедических и поддерживающих носков — для повседневной ходьбы, чувствительных стоп, диабетической стопы, отеков, спорта и разных типов активности.

Педортические аксессуары для поддержки и комфорта.
Контактная информация
Wilton Feet Pedorthic Center
Orthopedic Shoes and Orthotics
- Телефон: +1 954-736-1790
- Email: [email protected]
- Адрес: 1749 NE 26th Street, Wilton Manors, FL 33305
- Часы работы: Monday-Saturday, 10am-6pm

Простыми словами

Мы помогаем не просто “купить удобную обувь”.
Мы смотрим на стопу, походку, давление и посадку обуви — и подбираем решение, которое помогает человеку ходить увереннее, устойчивее и комфортнее.
The Clinical Operating System for AI Biomechanics.
Deterministic Verification for Markerless Human Movement
- Closing the Stochastic Gap in Human Movement AI.
- Establishing the Standard of Care for Hybrid Kinematic and PINN-Enforced Validation.
- Bringing surgical-grade integrity to Main Street clinics, PT offices, and retail footwear specialists.

The Impasse: The Crisis of Biomechanical Integrity
The transition of movement science from the laboratory to Main Street has exposed fatal flaws in both generative AI and the current standard of care. We are confronting a systemic, three-front crisis:
1. The Stochastic Gap (AI Averaging)
Current markerless engines are foundation models optimized for the statistical mean. Unconstrained foundation models suffer from severe adversarial instability in high-dimensional observation spaces. When encountering pathological outliers, these models fail to preserve local tangent proximity, resulting in 'Artificial Health'—a phenomenon where critical biomechanical dysfunctions are probabilistically smoothed into healthy statistical averages.
2. The Gabapentin Gap (Public Health Absurdity)
The current ecosystem for managing chronic foot pain and peripheral neuropathy is a public health absurdity. The medical establishment has surrendered to the "Gabapentin Gap"—numbing the pain with medication rather than mapping and treating the kinetic root cause. Conversely, the retail footwear industry relies on untrained clerks using observational guesswork to prescribe biomechanical interventions. There is zero deterministic bridge between clinical diagnosis and structural footwear solutions.
3. The Regulatory Cliff (Title VII Mandate)
Let us be brutally honest: no diagnostic tool eliminates gravity, meaning fall-risk litigation in the senior market is inevitable. Under the 2026 Trump AI Act, delivering "black box" AI hallucinations that miss these risks is now classified as Willful Negligence. To survive, movement AI must minimize hallucinations to a statistical zero while enforcing a mandatory Human-in-the-Loop (HITL) workflow. The output must not only be "clinically accurate"—it must generate an immutable audit trail armored to withstand ruthless Medicare audits and hostile court discovery.
The Solution: The GaitMaps Clinical Infrastructure
GaitMaps is the Deterministic Shield designed to bridge the gap between raw probabilistic pose-estimation and surgical-grade clinical truth. We have eliminated the focal-length variability and calibration drift of mobile applications, replacing them with a rigorous, closed-loop clinical operating system.
Phase 1: The Static Baseline & Objective Intake. High-fidelity kinematics require deterministic ground truth. Before dynamic capture initiates, the GaitMaps workflow ingests HIPAA-compliant patient metadata and self questionnaire, objective clinical examination, and high-resolution static plantar pressure mapping (e.g., Aetrex Albert 2Pro). This establishes a structural baseline and defines the explicit clinical objective—whether footwear intervention, orthotic prescription, or surgical pre-planning—ensuring the downstream AI is constrained by medical intent, not statistical guesswork.
Phase 2: Constraint-Augmented Dynamic Capture. We reject the "noisy," uncalibrated data of consumer smartphones. The primary GaitMaps environment establishes an intrinsic, unshod baseline—deploying laterality-coded neon socks for limb disambiguation—captured via a synchronized, dual-camera fixed-station array (providing independent sagittal and posterior views) utilizing 120fps CMOS sensors [OBSBOT Tail 2]. This optical feed is strictly synchronized with a tactile pressure walkway. To capture extended "ecological gait"—shod movement over longer durations in natural clinical environments—the protocol expands to include dynamic 4K/120fps sagittal and posterior tracking via an autonomous follow-flight drone [HOVERAir X1 PROMAX]. Across all capture modes, by fusing Hybrid Kinematics and Tactile Sensing (Zhao/Huang 2026). By deploying low-friction Optical Anchors at the Calcaneal Apex and Tibial-Ankle Axis, and syncing them with continuous Ground Reaction Forces (GRF), we establish a mathematically sterile, zero-parallax ambient space.
Phase 3: Clinician-in-the-Loop (HITL) Architecture. Pure markerless AI cannot synthesize complex pathology into a legally defensible treatment plan. The GaitMaps architecture operates on a strict Human-in-the-Loop (HITL) verification protocol. The AI engine processes the spatiotemporal and kinematic data, but a Licensed Pedorthist or qualified clinician validates the output. This transforms raw biomechanical data into a Sovereign Clinical Asset, generating an actionable PDF report and initiating a structured, compliant follow-up loop.

DATA RICHNESS AND DATA LOGIC
The Engine: The FootCode™ Matrix
Generative foundation models represent a leap in computational movement science, but they possess a fatal clinical flaw: they are probabilistic. They natively regress to the mean, filtering critical pathological deviations as kinematic noise. The FootCode™ Matrix is our proprietary "Optimization Wrapper"—a deterministic layer that forces probabilistic models to obey rigid-body Newtonian constraints.Our architecture leverages Tangent Bundle Manifold Learning (TBML) and Grassman & Stiefel Eigenmaps (GSE) to globally align local tangent spaces, preventing spatial deformation. This geometric manifold is strictly subjugated to real-world kinetic forces via localized Physics-Informed Neural Networks (PINNs), mathematically bounding the Jacobian norm to eliminate adversarial instability and isolate mechanical deficits like propulsive decay.

Multimodal Sensor Fusion: Engineering the Ground Truth
An algorithm is only as sovereign as its input. We feed the FootCode™ Matrix a multi-layered, artifact-free data hierarchy, eliminating the "Garbage In, Garbage Out" limitations of standard markerless systems:
1
Intent-Driven Constraints
Algorithmic weighting is dynamically informed by prior static diagnostics and structured clinical objectives.
2
Spatial Ground Truth
Kinematics are derived from fixed-station CMOS arrays locked to high-contrast optical anchors, preserving the integrity of the Tibial-Ankle Vector.
3
Kinetic & Temporal Gating
We fuse optical data with continuous tactile sensor arrays (pressure mapping). This provides absolute temporal truth—microsecond-accurate heel-strike and toe-off event detection—alongside continuous Center of Pressure (CoP) tracking to anchor Inverse Dynamics calculations.
4
Ecological Contrast
We analyze intrinsic mechanics via the clinical gold standard (barefoot baseline) and cross-validate against "ecological gait" (shod, longer-duration movement) via dynamic drone capture.
Immutable Compliance Provenance
We recognize that clinical algorithms are medical devices. The FootCode™ Matrix is hardwired into a cryptographically secure audit log. Every constraint-based adjustment and Human-in-the-Loop (HITL) validation is hashed to an immutable ledger. This transforms our biomechanical pipeline into a Title VII-compliant, auditable Safe Harbor for institutional deployment.
CALL TO ARMS
Scientific Consortium Call to Arms
We are currently in Stealth Mode, finalizing the mathematical formalisms and Inverse Kinematics (IK) boundaries for our foundational Intellectual Property. We are actively recruiting elite computational biomechanists, OpenSim/Moco experts, and kinematic researchers to join as Joint Inventors. This is not a multi-year academic study; this is a targeted, high-stakes sprint to codify the divergence gates that will establish the global standard for AI clinical safety.
PLEASE GET IN TOUCH: [email protected]
Physics constraints
The FootCode™ Matrix: Clinical Decision Intelligence
GaitMaps applies proprietary physics-based filters to every AI inference, enforcing Inverse Kinematics (IK) constraints that ensure outputs are biomechanically plausible. This approach is critical in the ankle–foot complex, where subtle AI "smoothing" can mask the propulsive decay and midfoot instabilities that lead to chronic pain. We don't just track movement; we enforce Kinetic Consistency.
Located in Florida, the Clinical Validation Center (CVC-1) serves as our primary ground-truth engine. In this active clinical environment, we capture the complexities of the "everyday" gait—the shuffling, the heel-drops, and the compensatory patterns of the non-athlete. By converging ground-truth sensor data, real-world footwear solutions, and human-in-the-loop review, CVC-1 ensures that the GaitMaps OS is not just accurate in theory, but legally and clinically defensible in practice.

Multimodal Sensor Fusion: Engineering the Ground Truth
An algorithm is only as sovereign as its input. We feed the FootCode™ Matrix a multi-layered, artifact-free data hierarchy, eliminating the "Garbage In, Garbage Out" limitations of standard markerless systems:
01
Intent-Driven Constraints
Algorithmic weighting is dynamically informed by prior static diagnostics and structured clinical objectives.
02
Spatial Ground Truth
Kinematics are derived from fixed-station CMOS arrays locked to high-contrast optical anchors, preserving the integrity of the Tibial-Ankle Vector.
03
Kinetic & Temporal Gating
We fuse optical data with continuous tactile sensor arrays (pressure mapping). This provides absolute temporal truth—microsecond-accurate heel-strike and toe-off event detection—alongside continuous Center of Pressure (CoP) tracking to anchor Inverse Dynamics calculations.
04
Ecological Contrast
We analyze intrinsic mechanics via the clinical gold standard (barefoot baseline) and cross-validate against "ecological gait" (shod, longer-duration movement) via dynamic drone capture.
Immutable Compliance Provenance
We recognize that clinical algorithms are medical devices. The FootCode™ Matrix is hardwired into a cryptographically secure audit log. Every constraint-based adjustment and Human-in-the-Loop (HITL) validation is hashed to an immutable ledger. This transforms our biomechanical pipeline into a Title VII-compliant, auditable Safe Harbor for institutional deployment.
Scientific Consortium Call to Arms
We are assembling a consortium of elite computational biomechanists, OpenSim and inverse-dynamics researchers, and clinically grounded validation leaders who want their models to stand up to regulatory scrutiny. If you are building AI gait analysis and need a defensible safety layer, we invite you to collaborate, co-author validation protocols, and help define the compliance standard for 2026.

Role
CEO, GaitMaps Systems, Inc.
Licensed Pedorthist (Florida) • FootCode Logic Architect • Wilton Feet Pedorthic Center
Leadership
Meet the Founder: Jacob Bernstein, LPed.
Biography
Jacob Bernstein is a Licensed Pedorthist first and an innovator by necessity. His perspective is forged in the clinical trenches of Wilton Feet, his Florida-based practice, where measurement rigor, patient safety, and reproducible outcomes are non-negotiable daily requirements.
GaitMaps was born from a professional impasse: the lack of a gait analysis solution capable of delivering surgical-grade truth in a real-world clinical setting. Driven by the functional failures of "black box" AI in his own exam room, Jacob is developing the FootCode™ Logic to bridge the gap between abstract predictions and the high-stakes reality of patient pathology. He is building the platform he couldn't find—a system that ensures every footwear and orthotic recommendation is anchored in deterministic physics rather than statistical guesswork.
Vision
His vision is to move AI biomechanics away from guess‑estimation toward compliant, human‑centric precision tools— grounding automation in clinical context, physics‑based constraints, and validated, traceable data.
Academic Credentials
- MBA, Stanford University Graduate School of Business
- MA, Psychology, Stanford Graduate School of Education
- BS, Finance, Wharton School of Business
- BA, Mathematics, University of Pennsylvania
- Pedorthist, Steampunk Bionics Academy